DUST: Smart Logistics Control
Dynamic Unified Smart Transport (DUST) is an IoT-based logistics platform orchestrating AGVs, conveyors, and gates. Features a custom binary protocol for high-speed, synchronized control.
Project Overview
DUST solves the challenge of coordinating heterogeneous logistics equipment. By integrating AGVs, automatic gates, and conveyor belts into a single control loop, it enables fully automated material transport with real-time status monitoring.
Key Engineering Contributions
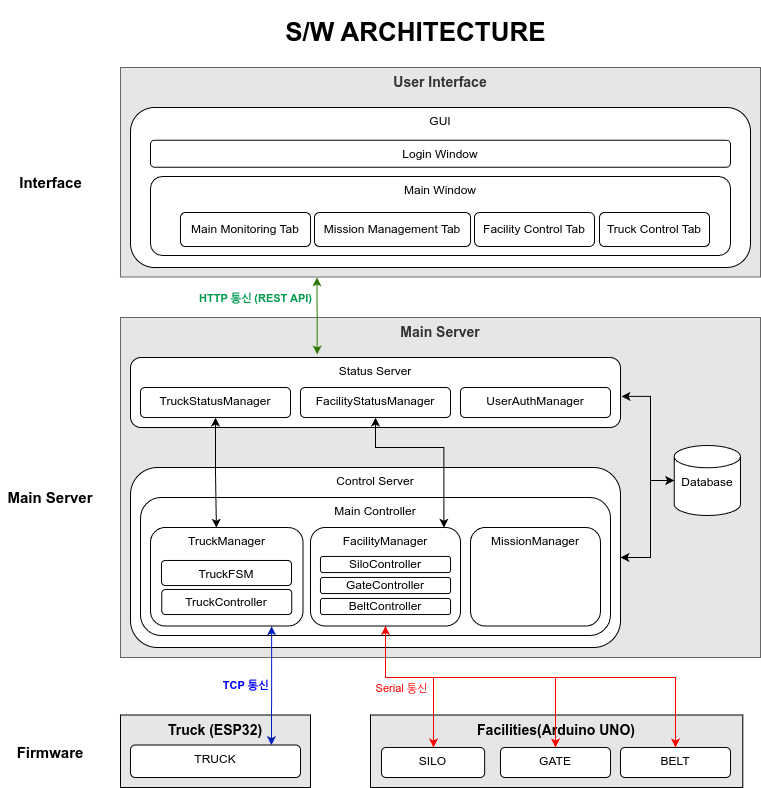
Unified Control Architecture
Designed the overarching system architecture that unifies disparate hardware (mobile AGVs, static gates, conveyor belts) into a single synchronous control loop. Defined the master-slave state machine logic.
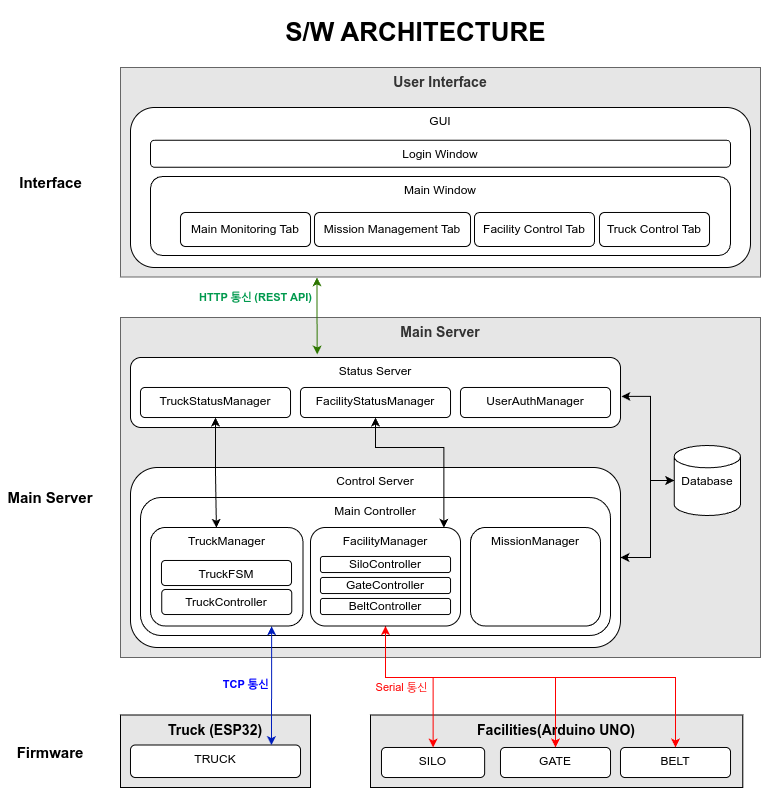
Custom Binary Protocol
Developed a lightweight custom TCP/IP binary protocol instead of standard JSON. This minimized overhead, reducing command latency by 3x and enabling sub-second synchronization between the central server and embedded controllers.
Central Control Server & Dashboard
Built the multi-threaded Central Control Server in Python. Developed the operator dashboard using PyQt, which provides a real-time "digital twin" view of the factory floor, showing active AGV paths and equipment states.
Core Technology
- Line Tracing & Navigation: PID control for line following combined with RFID tag detection for absolute localization.
- Communication: Socket-based TCP/IP architecture handling concurrent connections from multiple hardware nodes.
- Safety Interlocks: Hardware and software safeguards to prevent gate closure on AGVs or conveyor jams.
Tech Stack
Technical Challenges & Solutions
Problem: JSON parsing overhead caused delays in fast-moving AGV control
loops.
Solution: Designed a lightweight custom binary protocol, significantly
improving response times for stop/start commands.
Problem: RFID reading operations temporarily interfered with PWM motor
control signals.
Solution: Implemented a task scheduling strategy where PID updates are
briefly paused during critical RFID reads to maintain stability.